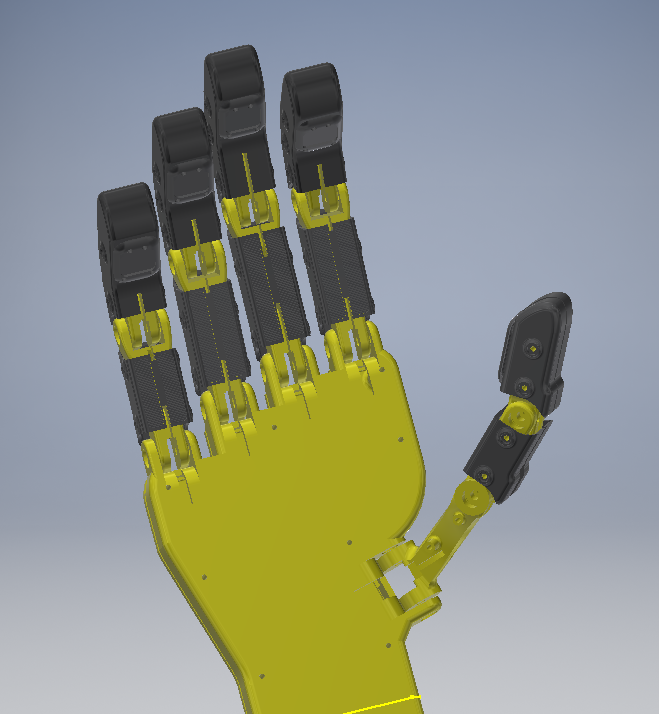
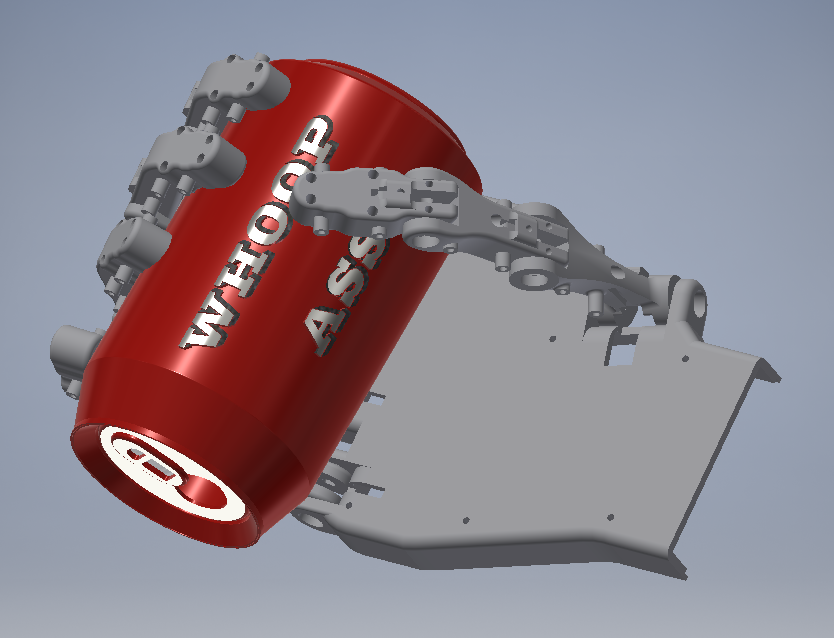
Projekt jest realizacją Grantu Rektorskiego 2018/2019 i zakłada stworzenie dłoni robotycznej z czujnikami nacisku, której zadaniem jest chwytanie i unoszenie przedmiotów. Pierwszy etap prac zakończył się stworzeniem mechanicznej konstrukcji Gentle Grippera. Kolejną fazą projektu jest stworzenie rękawicy sterującej powstałą protezą.
Docelowo robot ma brać udział w zawodach robotycznych w kategorii Freestyle, a w przyszłości służyć jako stanowisko do ćwiczeń dla studentów.
Zespół:
- Maciej Aleksandrowicz
- Rafał Kordaczek
- Mikołaj Mrówka
- Łukasz Leśny
- Jakub Lassak