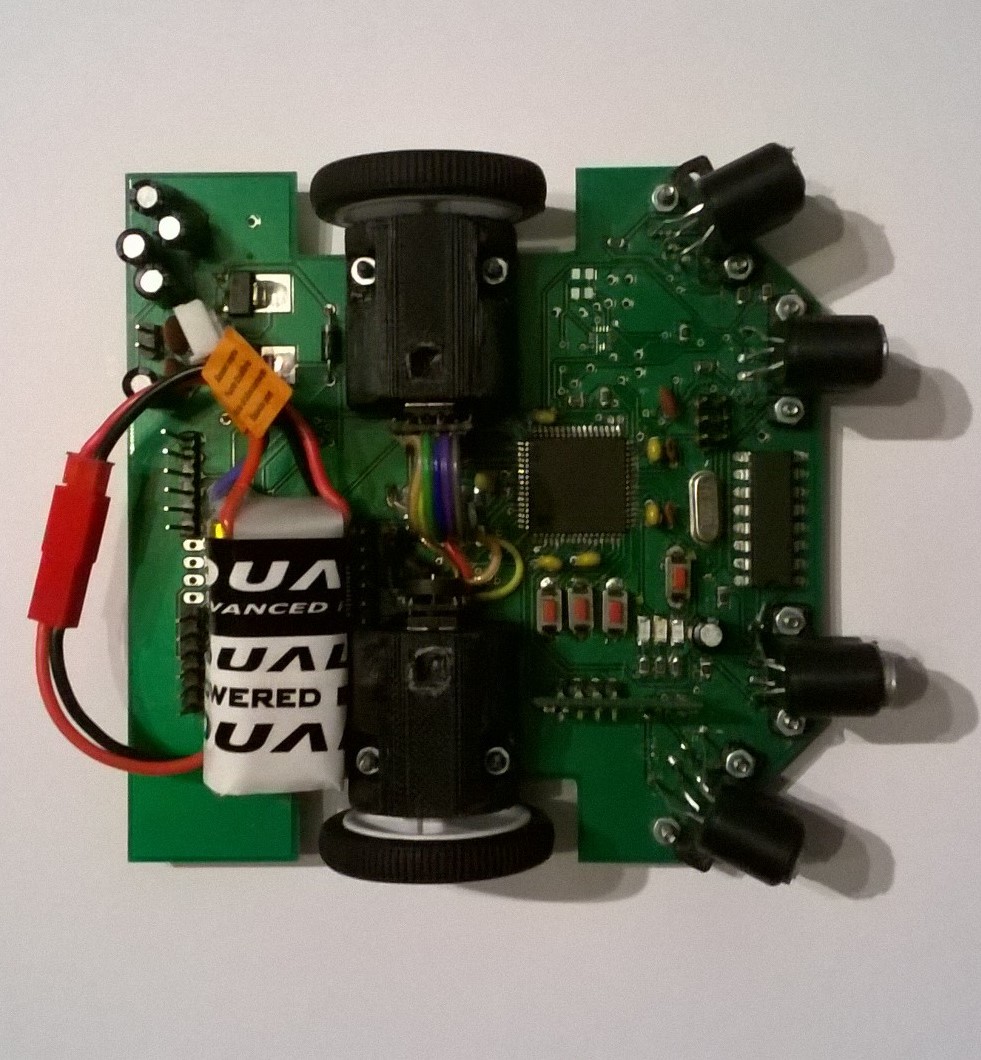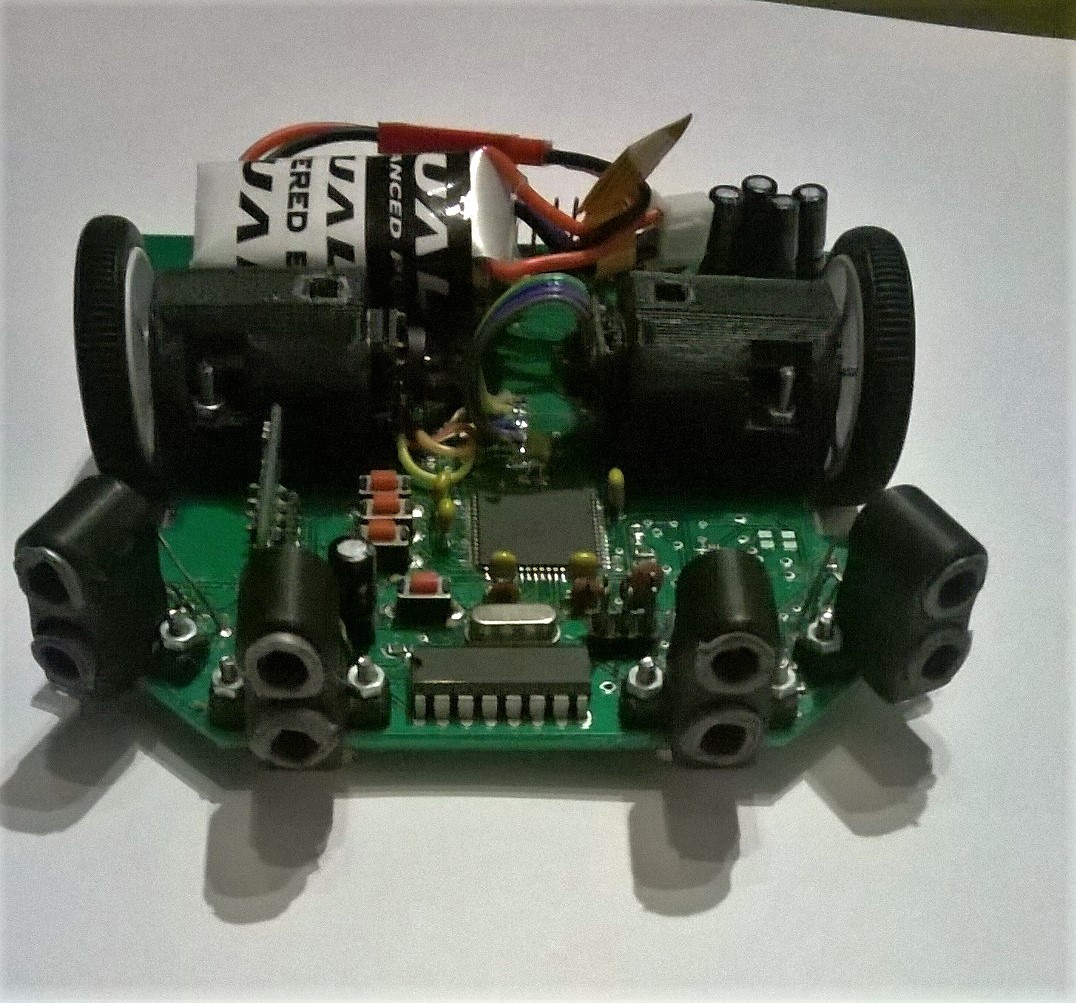
Celem projektu jest budowa robomyszy eksplorującej labirynt i wyznaczającej najszybszą drogę do jego środka. Micromouse Micky ma startować w zawodach w kraju i za granicą (i wygrywać!). Jest to drugi robot tego typu konstruowany przez obecny zespół. Konstrukcja oparta jest na mikrokontrolerach z rodziny AtXmega i AtTiny, mikrosilnikach DC z przekładnią, czujnikach odległości, akcelerometrze, żyroskopie i enkoderach magnetycznych. Specyfika zawodów wymaga konstrukcji własnych czujników odległości złożonych z diody IR i fototranzystora. Podstawowe wymagania względem robota to: szybkość (do 2 m/s), zwrotność, precyzyjny pomiar odległości względem ścianek labiryntu i dokładne określenie swojego położenia przy wykorzystaniu fuzji wszystkich czujników.
ZESPÓŁ:
- Koordynator: Dominik Markowski mail: dmarkowski19@gmail.com
- Jan Życzkowski
- Piotr Papież
- Mateusz Wąsala
- Artur Hadasz